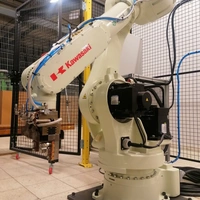
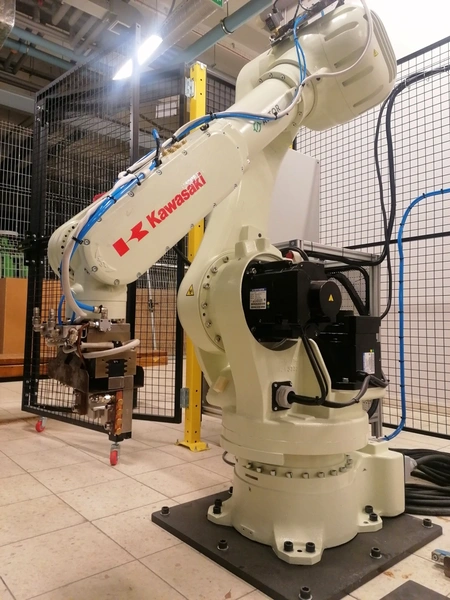
Wielofunkcyjny robot do prasy hydraulicznej 500T
1. Robot przemysłowy – Kawasaki RS030N
• maksymalny udźwig: 30 kg
• liczba osi swobody: 6
• maksymalny zasięg: 2100 mm
• masa robota (ramię): 555 kg
• powtarzalności: ≤ ±0.03mm , (±0.06 mm z powierzchnią flanszy kiści -z godnie z normą ISO 9283)
• prędkość na kolejnych osiach robota [°/s]: JT1=180, JT2=180, JT3=185, JT4=260, JT5=260, JT6=360
• zakres ruchu robota na kolejnych osiach [°]: JT1=±180, JT2=+140 ÷ -105, JT3=+135 ÷ - 155, JT4=±360, JT5=±145, JT6=±360.
• wbudowana instalacja pneumatyczna
• Stopień ochrony: kiść robota: IP67, ramie robota: IP65
• ręczny programator robota
• kontroler robota (wbudowane 2 porty Ethernet (z obsługą protokołów TCP i UDP) oraz RS232, 32 wejściowe sygnały cyfrowe, 32 wyjściowe sygnały cyfrowe, możliwość dołączenia 3 osi zewnętrznych, funkcja wykrywania kolizji, wbudowany WEB Serwer, port USB, programowanie przy użyciu ręcznego programatora oraz języka strukturalnego z poziomu komputera PC.
2. Chwytak do kucia na gorąco umożliwiający pracę z detalami
• wykonanymi z różnych materiałów
• rozgrzanymi do temperatury 1200 stopni Celsjusza
• o masie do 10 kilogramów
• o maksymalnej długości 500 mm
3. Funkcjonalność nadążania robota za siłą zewnętrzną – licencja Soft Absorber
• możliwy złożony ruch robota, będący relacją między siłą zewnętrzną, a siłą napędową robota, co umożliwia zaprogramowanie robota w sposób, w którym jego ruch uzależniony jest całkowicie od działającej siły we wszystkich osiach robota
4. System bezpieczeństwa stanowiska zrobotyzowanego
• System bezpieczeństwa oparty o sterownik bezpieczeństwa Safety PLC
w ramach umów i zleconych zadań badawczych
Badanie zachowania się i obciążenia narzędzi stosowanych do procesów przeróbki plastycznej, analiza zrobotyzowanych procesów kucia matrycowego, badania obciążenia i optymalizacji ruchu manipulatorów do kucia swobodnego, badania związane z programowaniem robotów dedykowanych do procesów przeróbki plastycznej
Pomiar prędkości ruchu i położenia narzędzi stosowanych do procesów przeróbki plastycznej, pomiar siły nacisku narzędzi i przemieszczeń zachodzących podczas odkształcania, pomiar obciążenia manipulatorów kuźniczych, pomiar i optymalizacja ruchu robota podaczas kucia wielowykrojowego

Jednostka odpowiedzialna
Grupa / laboratorium / zespół
SMART Manufacturing - Stanowisko robotyzacji i cyfryzacji procesów wytwarzania