Aparatura
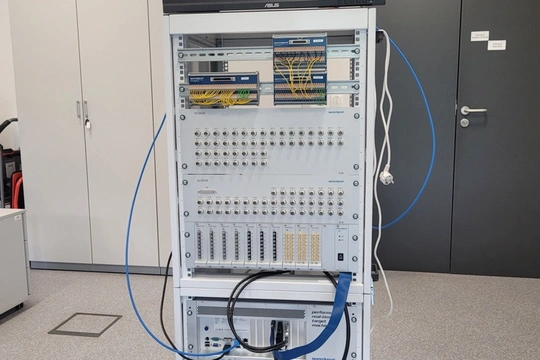
Maszyna czasu rzeczywistego
Jednostka:
Biuro Administracyjne Wydziału
Osoba kontaktowa:
Penczek Adam
Opis techniczny:
Maszyna czasu rzeczywistego Speedgoat Skalowalny, wysokowydajny system testowy działający w czasie rzeczywistym do symulacji sprzętowej (HIL) i szybkiego prototypowania sterowania. System jest wyposażony w wydajny wielordzeniowy procesor zapewniając…
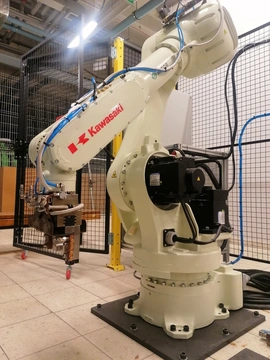
Wielofunkcyjny robot do prasy hydraulicznej 500T
Osoba kontaktowa:
Lisiecki Łukasz
Opis techniczny:
1. Robot przemysłowy – Kawasaki RS030N
• maksymalny udźwig: 30 kg
• liczba osi swobody: 6
• maksymalny zasięg: 2100 mm
• masa robota (ramię): 555 kg
• powtarzalności: ≤ ±0.03mm , (±0.06 …