Aparatura
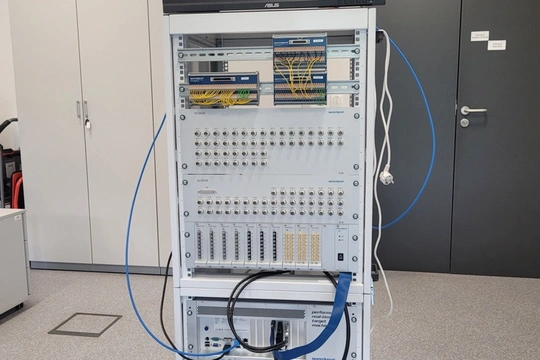
Maszyna czasu rzeczywistego
Jednostka:
Biuro Administracyjne Wydziału
Osoba kontaktowa:
Penczek Adam
Opis techniczny:
Maszyna czasu rzeczywistego Speedgoat Skalowalny, wysokowydajny system testowy działający w czasie rzeczywistym do symulacji sprzętowej (HIL) i szybkiego prototypowania sterowania. System jest wyposażony w wydajny wielordzeniowy procesor zapewniając…
Mobilny robot kroczący
Jednostka:
Katedra Robotyki i Mechatroniki
Osoba kontaktowa:
Koszyk Joanna
Opis techniczny:
Spot to kroczący, autonomiczny robot mobilny wyposażony w 5 kamer stereowizyjnych, które umożliwiają omijanie przeszkód oraz poruszanie się po trudnym terenie. Robot posiada możliwość pracy w trybie autonomicznym, zbierania danych, int…
