Aparatura
System do pomiaru właściwości mechanicznych biomateriałów
Jednostka:
Katedra Robotyki i Mechatroniki
Osoba kontaktowa:
Kijanka Piotr
Opis techniczny:
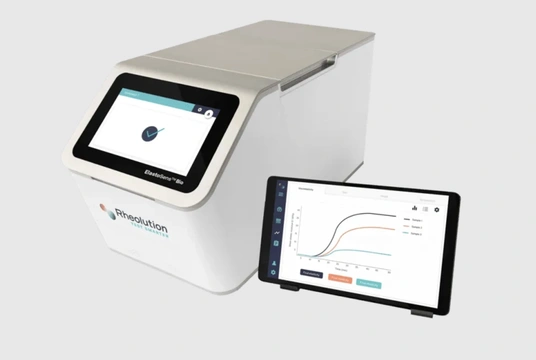
System ElastoSens Bio jest zaawansowanym urządzeniem pomiarowym przeznaczonym do niedestrukcyjnej i bezkontaktowej analizy właściwości mechanicznych materiałów miękkich, w tym biomateriałów oraz tkanek biologicznych. Aparatura wykorzys…
System do badań nieniszczących metodami aktywnej termografii
Jednostka:
Katedra Robotyki i Mechatroniki
Osoba kontaktowa:
Roemer Jakub
Opis techniczny:
Na Katedrze Robotyki i Mechatroniki WIMIR stworzone i rozwijane jest laboratorium badań metodami aktywnej termografii. Laboratorium oferuje systemy do badań metodami termografii laserowej, halogenowej oraz wibrotermografii. Baza sprzętowa obejmuje s…
Mobilny robot kroczący
Jednostka:
Katedra Robotyki i Mechatroniki
Osoba kontaktowa:
Koszyk Joanna
Opis techniczny:
Spot to kroczący, autonomiczny robot mobilny wyposażony w 5 kamer stereowizyjnych, które umożliwiają omijanie przeszkód oraz poruszanie się po trudnym terenie. Robot posiada możliwość pracy w trybie autonomicznym, zbierania danych, int…

Uniwersalna Maszyna Wytrzymałościowa AllroundLine ZwickRoell Z010 TH
Jednostka:
Katedra Robotyki i Mechatroniki
Osoba kontaktowa:
Bryła Jakub
Opis techniczny:
Wysoko specjalistyczna elektryczna maszyna wytrzymałościowa ZwickRoell Z010 TH umożliwia prowadzenia wieloskalowych badań wytrzymałościowych materiałów biologicznych oraz elementów drukowanych w technologiach addytywnych, z wysokorozdz…

Wirtualne laboratorium komputerowe W.I.M.i R.
Jednostka:
Katedra Robotyki i Mechatroniki
Osoba kontaktowa:
Mańka Michał
Opis techniczny:
Wirtualne laboratorium komputerowe zostało opracowane i wdrożone w 2023r. na Wydziale Inżynierii Mechanicznej i Robotyki. Wdrożone laboratorium umożliwia prowadzenie prac projektowych i realizację analiz numerycznych z zastosowanie klastra komputero…

Skanujący wibrometr laserowy (SLDV)
Jednostka:
Katedra Robotyki i Mechatroniki
Osoba kontaktowa:
Pieczonka Łukasz
Opis techniczny:
Uniwersalne narzędzie umożliwiające analizę i wizualizację drgań strukturalnych w szerokim paśmie częstotliwości (od 0 do 25 MHz) oraz bardzo wysokiej dokładności (<1𝑝𝑚/√𝐻𝑧 lub <0.1 μm/s/√𝐻𝑧). Zastosowanie światła laseroweg…

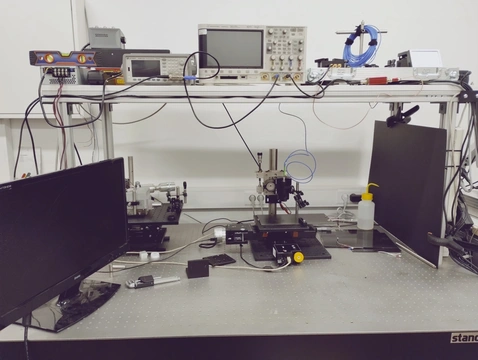
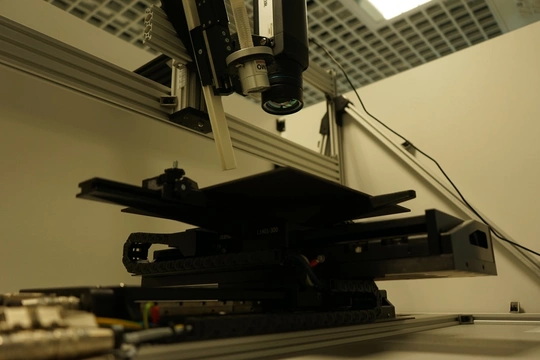
System do badań materiałów metodą laserowo generowanych ultradźwięków
Jednostka:
Katedra Robotyki i Mechatroniki
Osoba kontaktowa:
Ambroziński Łukasz
Opis techniczny:
Stanowisko do bdadań nieniszczących metodą laserowo generowanych ultradźwięków służy do badania materiałów konstrukcyjnych takich jak stopy metali, materiały kompozytowe. Urządzenie pozwala na bezkontaktowe wzbudzanie i detekcję fal ul…