Aparatura
System do trawienia i nanoszenia warstw z wyposażeniem
Jednostka:
Instytut Elektroniki
Osoba kontaktowa:
Wiśniowski Piotr
Opis techniczny:
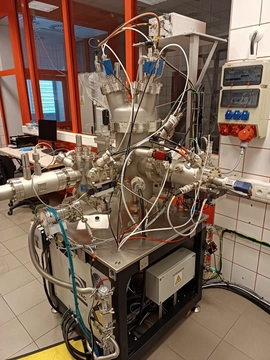
Komora próżniowa z magnetronami DC i RF oraz źródłem jonów KDC40.
1.Dwa źródła magnetronowe
Kołnierz montażowy: DN 100CF
Max. moc (DC ): 400 W DC
Max. moc (RF ): 400 W RF
Max. napięcie (DC): 1200 V
…
Stanowisko do charakteryzacji aktywnych obwodów mikrofalowych w pasmie do 67 GHz
Osoba kontaktowa:
Sorocki Jakub
Opis techniczny:
Stanowisko pomiarowe składa się z wektorowego analiza sieci Rohde & Schwarz ZNA67 z opcją B16, mechanicznego kitu kalibracyjnego Rohde & Schwarz ZN-Z218, dwóch tunerów impedancji Focus Microwaves C6720B wraz z oprogramowan…

Drukarka 3D Bambu Lab
Osoba kontaktowa:
Madejski Paweł
Opis techniczny:
H2D Pro to zaawansowana, profesjonalna drukarka 3D FDM klasy badawczo-rozwojowej, zaprojektowana z myślą o precyzyjnych zastosowaniach inżynieryjnych i eksperymentalnych. Rozbudowane systemy AMS 2 Pro i AMS HT umożliwiają automatyczne zarządzanie wi…

System do badań nieniszczących metodami aktywnej termografii
Jednostka:
Katedra Robotyki i Mechatroniki
Osoba kontaktowa:
Roemer Jakub
Opis techniczny:
Na Katedrze Robotyki i Mechatroniki WIMIR stworzone i rozwijane jest laboratorium badań metodami aktywnej termografii. Laboratorium oferuje systemy do badań metodami termografii laserowej, halogenowej oraz wibrotermografii. Baza sprzętowa obejmuje s…
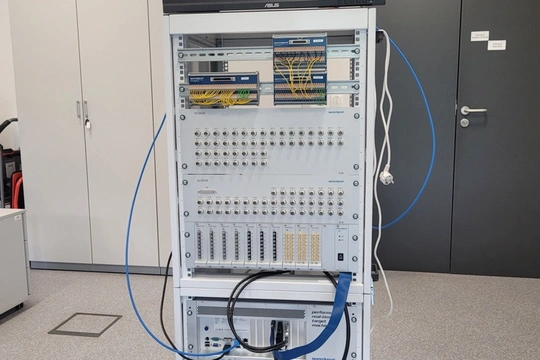
Maszyna czasu rzeczywistego
Jednostka:
Biuro Administracyjne Wydziału
Osoba kontaktowa:
Penczek Adam
Opis techniczny:
Maszyna czasu rzeczywistego Speedgoat Skalowalny, wysokowydajny system testowy działający w czasie rzeczywistym do symulacji sprzętowej (HIL) i szybkiego prototypowania sterowania. System jest wyposażony w wydajny wielordzeniowy procesor zapewniając…
Kamera wysokiej prędkości Phantom
Osoba kontaktowa:
Madejski Paweł
Opis techniczny:
Kamera Phantom Miro C211 8 GB Colour to zaawansowana kamera wysokiej prędkości, zaprojektowana z myślą o wymagających zastosowaniach badawczo-rozwojowych i przemysłowych. Wyposażona w sensor CMOS o rozdzielczości do 1280 × 1024 pikseli, oferuj…

Analizator przewodności cieplnej TRIDENT
Osoba kontaktowa:
Madejski Paweł
Opis techniczny:
Analizator Przewodności Cieplnej TRIDENT to zaawansowane urządzenie służące do pomiaru przewodnictwa cieplnego różnych materiałów, gdyż oferuje trzy różne techniki pomiaru przewodnictwa cieplnego: MTPS (Modified Transient Plane …

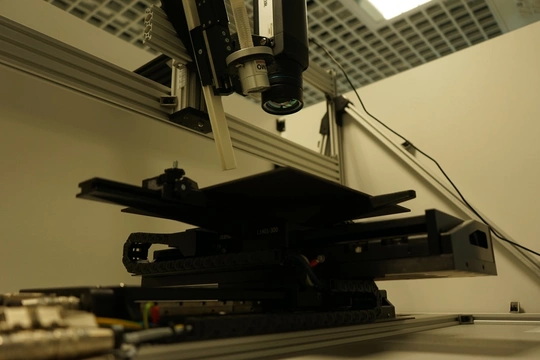
Skaner 3D EinScan-SP
Osoba kontaktowa:
Madejski Paweł
Opis techniczny:
Skaner Einscan SP 3D to precyzyjne, profesjonalne urządzenie skanujące, które zapewnia wyjątkową szczegółowość i wszechstronność w wielu zastosowaniach. Wykorzystuje technologię światła strukturalnego do precyzyjnego odwzorowania geome…

Drukarka 3D Ultimaker (FDM/FFF)
Osoba kontaktowa:
Madejski Paweł
Opis techniczny:
Drukarka 3D Ultimaker Method X pracuje w technologii FDM/FFF, umożliwiając precyzyjne wytwarzanie elementów z filamentów technicznych, takich jak ABS, Nylon, PETG, ASA czy kompozyty z włóknem węglowym. Umożliwia realizację proto…

Drukarka 3D Formlabs (LFS/SLA)
Osoba kontaktowa:
Madejski Paweł
Opis techniczny:
Drukarka 3D Formlabs Form 3+ wykorzystuje technologię LFS (Low Force Stereolithography) do precyzyjnego utwardzania żywic fotopolimerowych światłem laserowym. Umożliwia tworzenie modeli o wysokiej dokładności (do 25 µm) i gładkiej powierzchni.…
