Aparatura
Superkomputer Helios
Jednostka:
Akademickie Centrum Komputerowe CYFRONET AGH
Osoba kontaktowa:
Magryś Marek
Opis techniczny:
Superkomputer Helios to system zainstalowany w ACK Cyfronet AGH, a powstały w wyniku prac realizowanych w koordynowanym przez Cyfronet projekcie Narodowa Infrastruktura Superkomputerowa dla EuroHPC – EuroHPC PL. Superkomputer został zbudo…

Superkomputer Athena
Jednostka:
Akademickie Centrum Komputerowe CYFRONET AGH
Osoba kontaktowa:
Magryś Marek
Opis techniczny:
Athena osiąga teoretyczną moc obliczeniową ponad 7,7 PFlops. Do momentu instalacji Heliosa był to najszybszy superkomputer w Polsce.
Athena dostarcza polskiemu środowisku naukowemu i gospodarce zasoby obliczeniowe oparte na procesorach i akc…

Platforma badawczo-rozwojowa dla inteligentnych wieloagentowych robotycznych systemów rojowych
Jednostka:
Katedra Automatyki i Robotyki
Osoba kontaktowa:
Długosz Marek
Opis techniczny:
Roboty ROSbot XL firmy Husarion – uniwersalne, natywne dla ROS 2 autonomiczne platformy mobilne przeznaczone do zastosowań badawczo-rozwojowych i szybkiego prototypowania w warunkach indoor. Konstrukcja mechaniczna oparta jest na sztywnej rami…

Stanowisko Pomiarowe z Kamerą Hiperspektralną Specim FX 17e
Jednostka:
Centrum Doskonałości Sztucznej Inteligencji
Osoba kontaktowa:
Brodzicki Andrzej
Opis techniczny:
Stanowisko pomiarowe składa się z kamery hiperspektralnej Specim FX17e, oprogramowania Specim Insight v1.3 i Specim Lumo Recorder oraz platformy inferencyjnej Specim CUBE GigE. Specim FX17e to przemysłowa kamera pracująca w zakresie bliskiej podczer…

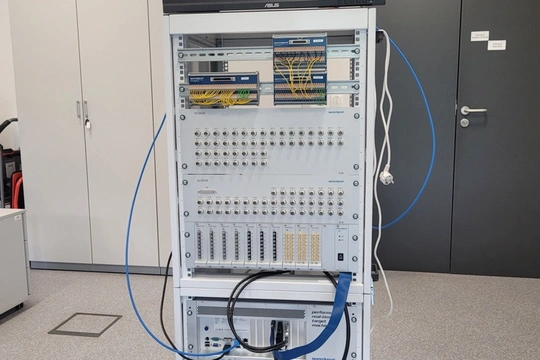
Maszyna czasu rzeczywistego
Jednostka:
Biuro Administracyjne Wydziału
Osoba kontaktowa:
Penczek Adam
Opis techniczny:
Maszyna czasu rzeczywistego Speedgoat Skalowalny, wysokowydajny system testowy działający w czasie rzeczywistym do symulacji sprzętowej (HIL) i szybkiego prototypowania sterowania. System jest wyposażony w wydajny wielordzeniowy procesor zapewniając…
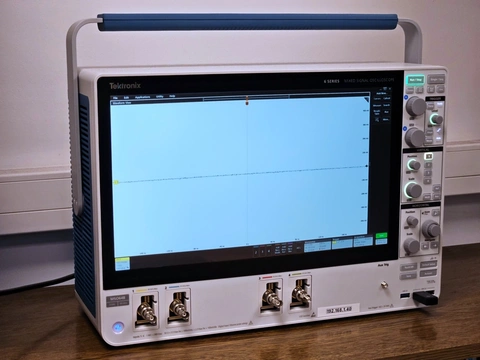
Oscyloskop minimum 4-kanałowy
Osoba kontaktowa:
Worek Cezary
Opis techniczny:
Oscyloskop sygnałów mieszanych Tektronix MSO64B-6-BW-4000 zapewnia wysoką jakość sygnałów pomiarowych do dalszej analizy i debugowania współczesnych systemów wbudowanych z zegarami i magistralami o częstotliwościach…
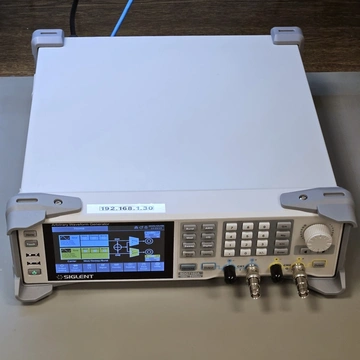
Generator Funkcyjny / Arbitralny dwukanałowy pracujący w paśmie co najmniej 1mHz do 1000 MHz
Osoba kontaktowa:
Worek Cezary
Opis techniczny:
Generator funkcyjny / arbitralny dwukanałowy pracujący w paśmie co najmniej od 1mHz do 1000 MHz pozwalający na generację sygnałów w trybie dwukanałowym i impedancji wyjściowej 50 OHM.
Generator arbitralny Siglent SDG7102A oferuje dwa kanał…
Skaner Laserowy Emesent Hovermap STX (LIDAR)
Jednostka:
Centrum Doskonałości Sztucznej Inteligencji
Osoba kontaktowa:
Brodzicki Andrzej
Opis techniczny:
Emesent Hovermap ST-X to zaawansowany mobilny system mapowania LiDAR, który łączy wysokowydajne skanowanie laserowe z wszechstronnymi możliwościami montażu. Zaprojektowany do pracy w różnorodnych środowiskach - wewnętrznych, zewnętrzny…

Mobilny robot kroczący
Jednostka:
Katedra Robotyki i Mechatroniki
Osoba kontaktowa:
Koszyk Joanna
Opis techniczny:
Spot to kroczący, autonomiczny robot mobilny wyposażony w 5 kamer stereowizyjnych, które umożliwiają omijanie przeszkód oraz poruszanie się po trudnym terenie. Robot posiada możliwość pracy w trybie autonomicznym, zbierania danych, int…

Wirtualne laboratorium komputerowe W.I.M.i R.
Jednostka:
Katedra Robotyki i Mechatroniki
Osoba kontaktowa:
Mańka Michał
Opis techniczny:
Wirtualne laboratorium komputerowe zostało opracowane i wdrożone w 2023r. na Wydziale Inżynierii Mechanicznej i Robotyki. Wdrożone laboratorium umożliwia prowadzenie prac projektowych i realizację analiz numerycznych z zastosowanie klastra komputero…
